

Tip of the Day 63: When does your Robot Listen?
Following on from tip #62 (Level v.s. Edge Actuated)…
Concept #2: When is the Robot Listening?
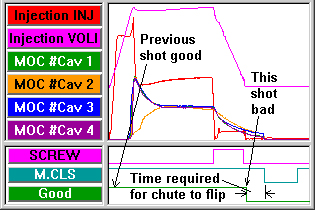
For both types of automation the sorting signal must be ready when the equipment needs it. For example a flipper chute must have the signal at its set level (“Good” or not) before the mold opens so that the parts can fall down the right chute. In the graph below the integration ends at the end of Screw Run which gives time before the mold opens (end of Mold Clamped)
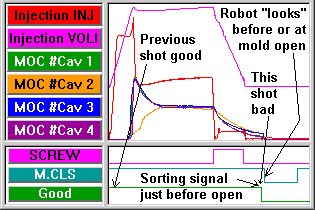
Some automation (again, I think Engel) requires that the “edge” or switch on every cycle occur before the mold opens. In this example the integration is set to a late time to include more of the pressure curve but still before the mold opens.
It is not possible to set the integration limit to after Mold Clamped goes off.
Note: if the Integration Limit time is before the end of Screw Run the eDART/ still waits until the end of Screw Run to compute the output. This is because it must also do values like backpressure, screw run time, volume integral etc. and they are not completed until the end of Screw Run.
Concept #3: It takes a little time for the eDART/ to compute integrals
When the time in the cycle reaches the “Integration Limit” the eDART must do its math to compute the integrals. The computer is fast but not instantaneous. It takes some fraction of a second to do its computations. More time is required with more sensors. The implications of this will be covered in the next tip.